- Precise Multi-DOF Control: High-performance actuators grant smooth, accurate locomotion and posture control.
- Customization Friendly: Open-source software and hardware interfaces encourage broad experimental use.
- Modular Design: Lightweight frame allows easy upgrades and sensor/actuator additions.
- Autonomous Navigation Base: Supports integrated navigation stacks for path planning and obstacle avoidance.
- Compatibility: Works with ROS and other robotics middleware.
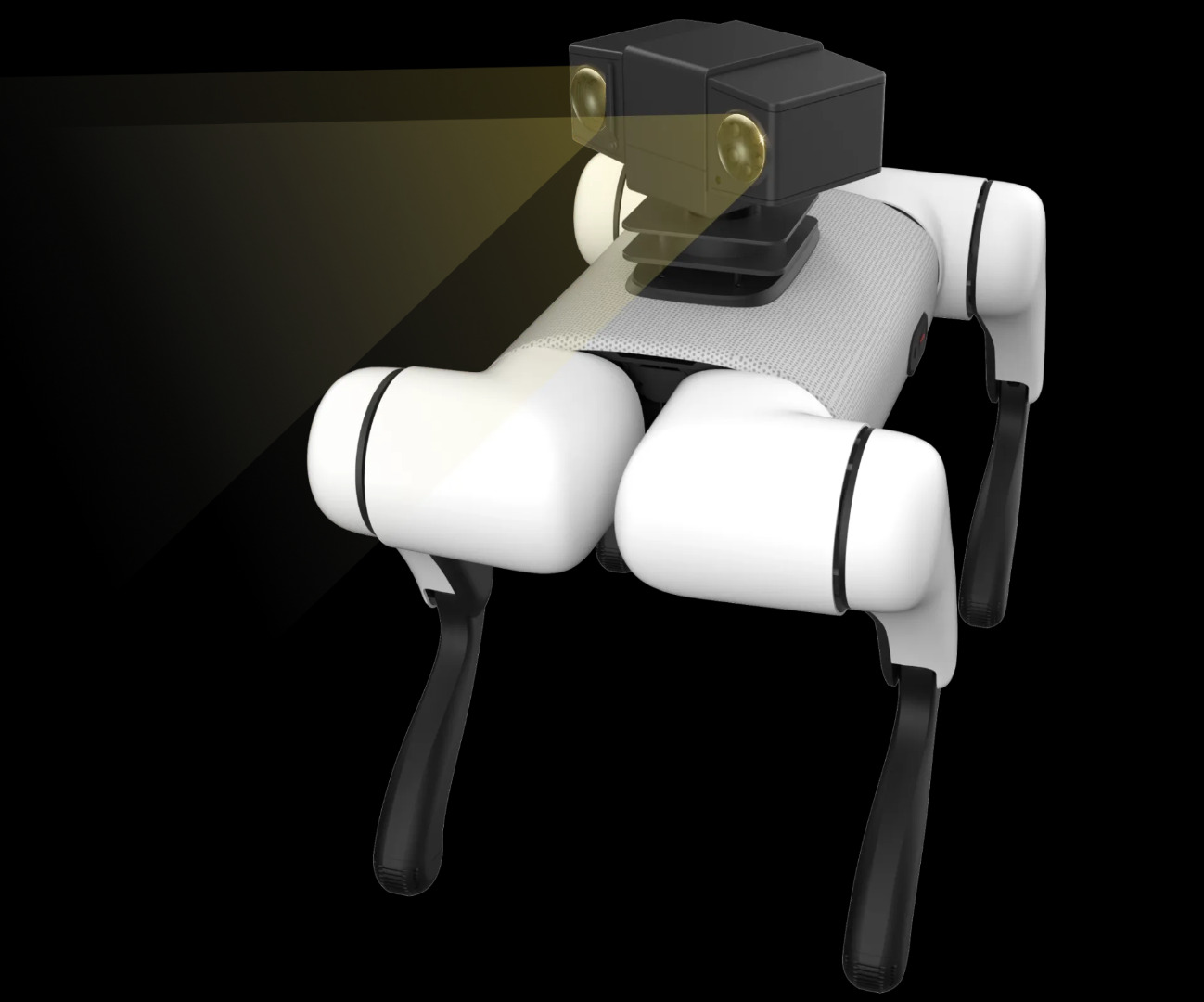
The BabyAlpha Dev-Q robot dog is a powerful open-source quadruped robotics platform developed by WEILAN Intelligent Technology, designed specifically for developers, researchers, and AI engineers.
Unlike the consumer-focused BabyAlpha A2, the Dev-Q is built as a fully customizable robotics development platform, offering direct access to hardware control, sensor data, and AI integration tools. With support for ROS (Robot Operating System) and open APIs, it enables rapid prototyping of advanced robotics applications—from locomotion algorithms to computer vision and autonomous navigation.
Equipped with high-performance joint actuators, the Dev-Q delivers smooth, precise, and dynamic quadrupedal movement. Its lightweight yet durable frame (approx. 7 kg) makes it ideal for indoor testing, research labs, and experimental robotics environments.
The robot supports modular expansion, allowing developers to integrate additional sensors, AI models, and custom hardware. With onboard computing capabilities and real-time control loops, the BabyAlpha Dev-Q is a flexible platform for pushing the boundaries of AI robotics, perception systems, and embodied intelligence.
Whether used in academic research, robotics startups, or AI development labs, the Dev-Q provides an accessible yet powerful entry into advanced quadruped robotics.
TECHNICAL SPECIFICATIONS
Model: BabyAlpha Dev-Q
Developer: WEILAN Intelligent Technology
Dimensions:
- Length: 516 mm
- Width: 298 mm
- Height: 308–338 mm
Weight: ~7 kg (with battery)
Mobility:
- Quadruped locomotion
- Max step height: ~120 mm
- Max slope: ±20°
Actuators:
- High-performance joint motors
- Multi-DOF precise motion control
Sensors:
- IMU (inertial measurement unit)
- Position encoders
- Expandable sensor interfaces (LiDAR, cameras, etc.)
Software & AI:
- Open-source software stack
- ROS / robotics middleware support
- APIs for motion, perception, and AI integration
- Real-time control & AI model deployment
Connectivity:
- Wi-Fi
- Bluetooth
- Developer access to telemetry & control
Battery Life:
Applications:
- Robotics R&D
- AI and machine learning research
- Autonomous navigation testing
- Education & STEM programs
- Startup prototyping